隨著人工智能(AI)和機器人技術(shù)的普及,教育領(lǐng)域正迎來一場深刻的變革。將易于上手的圖形化編程工具Scratch與工業(yè)級的機器人操作系統(tǒng)(ROS)相結(jié)合,為設(shè)計和實現(xiàn)教育機器人的人工智能應(yīng)用軟件提供了一條獨特且高效的路徑。這種融合不僅降低了機器人編程的入門門檻,激發(fā)了學(xué)習(xí)者的創(chuàng)造力,還能無縫銜接到專業(yè)的開發(fā)環(huán)境中。本文將系統(tǒng)闡述這一設(shè)計與實現(xiàn)過程。
一、設(shè)計理念:分層架構(gòu)與漸進學(xué)習(xí)
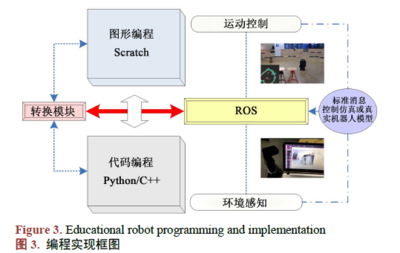
核心設(shè)計理念在于構(gòu)建一個分層、模塊化的軟件架構(gòu),并遵循從直觀到抽象、從簡單到復(fù)雜的漸進學(xué)習(xí)曲線。
- 用戶交互層(Scratch界面層):作為頂層,為初學(xué)者(尤其是K-12學(xué)生)提供圖形化積木塊編程環(huán)境。通過拖拽預(yù)先封裝好的、代表機器人核心功能(如移動、傳感器讀取、簡單視覺識別)的積木塊,學(xué)習(xí)者可以快速搭建出機器人的行為邏輯,實現(xiàn)避障、巡線、人臉跟蹤等基礎(chǔ)AI應(yīng)用。這一層屏蔽了底層復(fù)雜的代碼和ROS通信細(xì)節(jié)。
- 中間轉(zhuǎn)換與橋接層:這是實現(xiàn)融合的關(guān)鍵。需要一個專門的“橋接”軟件或服務(wù),負(fù)責(zé)將Scratch中生成的圖形化邏輯,實時翻譯并映射為標(biāo)準(zhǔn)的ROS消息和服務(wù)調(diào)用。例如,一個“前進”積木塊會被轉(zhuǎn)換為向
/cmd<em>vel話題發(fā)布一個geometry</em>msgs/Twist類型的速度消息。常見的工具包括Scratch的官方擴展(如Scratch Link)、或第三方開源項目如ROS-Scratch-Interface、scratch_ros等。
- 核心功能層(ROS節(jié)點層):這是機器人的“大腦”。在ROS框架下,每個獨立的AI功能都被實現(xiàn)為一個或多個松耦合的節(jié)點(Node)。例如:
- 感知節(jié)點:處理攝像頭數(shù)據(jù),運行基于OpenCV或簡單深度學(xué)習(xí)模型(如MobileNet SSD)的目標(biāo)檢測、人臉識別算法,并將結(jié)果(如目標(biāo)位置)發(fā)布到特定話題。
- 決策與控制節(jié)點:訂閱感知節(jié)點的話題和底層傳感器(如激光雷達、IMU)話題,根據(jù)Scratch層下發(fā)的指令或內(nèi)置的AI策略(如強化學(xué)習(xí)策略),計算出控制指令(速度、關(guān)節(jié)角度),并發(fā)布給執(zhí)行器。
- 仿真與可視化(可選但推薦):利用Gazebo等ROS仿真環(huán)境,在虛擬世界中安全、低成本地測試和演示AI算法與機器人行為。
- 硬件抽象層(ROS驅(qū)動層):直接與機器人底盤、電機、傳感器等物理硬件通信,將ROS的標(biāo)準(zhǔn)消息格式轉(zhuǎn)換為硬件能理解的指令,反之亦然。這確保了軟件的核心邏輯與具體硬件解耦,提高了可移植性。
二、實現(xiàn)步驟
第一階段:環(huán)境搭建與基礎(chǔ)功能封裝
1. 搭建ROS開發(fā)環(huán)境:在機器人主控計算機(如樹莓派、Jetson Nano或PC)上安裝ROS(推薦Noetic或Humble等版本)。
2. 封裝基礎(chǔ)ROS功能為Scratch積木:確定需要通過Scratch控制的核心功能(如:移動、讀取超聲波距離、獲取攝像頭圖像、啟動語音識別)。針對每個功能,在橋接層編寫對應(yīng)的接口,使其在Scratch中表現(xiàn)為一個可用的積木塊。例如,創(chuàng)建一個“當(dāng)檢測到人臉時”的事件積木,其背后是訂閱了人臉識別節(jié)點發(fā)布的話題。
第二階段:開發(fā)核心AI功能節(jié)點
1. 實現(xiàn)感知AI節(jié)點:使用ROS的視覺或語音包。例如,利用cv_bridge將ROS圖像消息轉(zhuǎn)換為OpenCV格式,運行一個訓(xùn)練好的輕量級TensorFlow或PyTorch模型進行物體分類,再將分類結(jié)果和位置信息封裝成自定義ROS消息發(fā)布出去。
2. 實現(xiàn)決策與控制節(jié)點:編寫節(jié)點來協(xié)調(diào)行為。例如,一個“自動巡邏并避障”的節(jié)點,會同時訂閱激光雷達數(shù)據(jù)(用于避障)和Scratch下發(fā)的“開始巡邏”命令,并綜合計算安全的速度指令。
第三階段:集成、測試與項目式學(xué)習(xí)
1. 集成測試:啟動所有ROS節(jié)點和Scratch橋接服務(wù)。在Scratch中搭建程序,觀察機器人在真實環(huán)境或Gazebo仿真中的響應(yīng)。
2. 設(shè)計層次化學(xué)習(xí)項目:
* 入門級:在Scratch中用積木讓機器人畫正方形、根據(jù)聲音大小改變LED燈顏色。
- 進階級:實現(xiàn)“聲控導(dǎo)航”(Scratch處理語音命令,觸發(fā)ROS導(dǎo)航棧)或“顏色追蹤”(Scratch設(shè)定目標(biāo)顏色,ROS視覺節(jié)點處理圖像并反饋位置,控制節(jié)點驅(qū)動云臺和底盤跟隨)。
- 挑戰(zhàn)級:在Scratch中設(shè)計一個簡單的“智能家居助手”邏輯,整合ROS中的多個AI節(jié)點,如人臉識別開門、語音命令控制、物體搬運等,完成一個綜合性的AI應(yīng)用場景。
三、優(yōu)勢與展望
優(yōu)勢:
低門檻,高上限:Scratch確保了趣味性和可及性,ROS則提供了無限的專業(yè)擴展可能。
理解完整技術(shù)棧:學(xué)習(xí)者能直觀理解從用戶交互、應(yīng)用邏輯、AI算法到底層控制的完整軟件開發(fā)生命周期。
* 培養(yǎng)計算思維與工程思維:在模塊化設(shè)計和問題分解中,潛移默化地培養(yǎng)了系統(tǒng)性思維能力。
展望:隨著邊緣AI計算能力的提升和預(yù)訓(xùn)練模型的微型化,可以直接在Scratch中引入更復(fù)雜的AI積木(如“訓(xùn)練一個圖像分類器”積木),背后自動調(diào)用ROS中的模型訓(xùn)練與部署流程。結(jié)合云端ROS和可視化編程的在線協(xié)作平臺,將使教育機器人AI軟件開發(fā)更具協(xié)作性和共享性。
通過精心設(shè)計的分層架構(gòu),將Scratch的易用性與ROS的強大能力相結(jié)合,我們能夠構(gòu)建一個極具吸引力的教育平臺,讓不同年齡段和水平的學(xué)習(xí)者都能親手設(shè)計和實現(xiàn)屬于自己的人工智能機器人應(yīng)用,在實踐中點燃對前沿科技的熱情。